#음슴체로 작성하겠음
#환경의 차이에따른 변수가 있을 수 있음
#작성자의 도구는 오큘러스 리프트(3센서) + Nolo Vr 이며 설치 환경은 아래와 같음

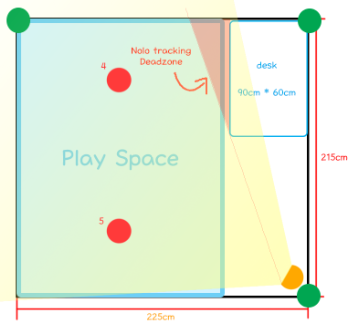
놀로의 베이스 스테이션 설치는 자기 방에서 베이스 방향이나 각도에 상관없이 데드존이 가장 적게 발생하는 위치에 적절히 설치하면됨
저는 저위치에 무릎높이로 설치해뒀음
=====================추가1=============================
몸에 장착할때 foot angle correction 때문에 허리에차는 트래커랑 신발 트래커 방향을 똑같이 맞춰야함
=====================추가1=============================
방향 신경안써도 잘댐... 그냥 자기가 생각하기에 베이스에 사각없을방향으로 달아주자
배치이후 기본적인 설치 방법은 다른 사람이 너무 잘써둔게있어서 링크로 대체함
(정보) nolo vr로 풀트래킹하는 방법 (작성자:현실세계)
위 글을 보고 설치했으면 calibrate부터 설명하겠음
calibrate는 Driver4vr이 놀로트래커<>베이스사이의 위치정보를 가지고 스팀VR환경에서 어느위치에 할당해줄지를 정하는 매우 중요한 단계임
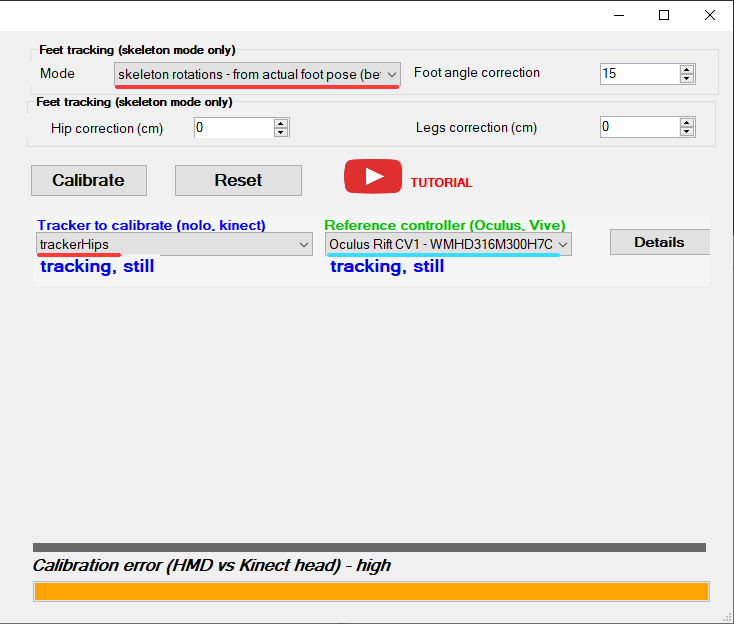
빨간 밑줄은 똑같이 맞추고 하늘색 밑줄은 자기가 편한데로 사용하면됨 (※단, 컨트롤러와 캘리할땐 반드시 헤드셋을 착용후 할것)
Foot angle correction 수치는 0으로 해두고하는게 좋음 나중에 driver4vr이 알아서 잡아줌
설정이 끝났으면 상단에있는 Calibrate버튼을 누르고 주의사항이 나오는데 한번더 확인을 누름
몰라도 되는 정보지만 Calibrate는 총 5위치를 정해서 동기화시키는데 3번은 X축,Z축 이동의 좌표를 2번은 Y축이동의 좌표를 동기화하는작업임

첫 3번은 그림처럼 자기 플레이 공간좌표 정보를 많이 줄곳으로 3곳을 정해서 움직일꺼임
주의할점은 반드시 3곳을 움직이고 캘리할때 높이를 일정하게 유지하는게 가장중요함 (높이 안맞으면 수평좌표가 기울거나 틀어짐)
허리 트래커가 위치할높이에서 10cm정도 위를 기준으로 높이잡는게 가장 베스트라 생각함
(3번위치까지 하고 헤드셋을 쓰고 확인해보면 이제 놀로트래커가 수평위치(X축/Z축)로는 완벽하게 움직이는걸 확인할수있음 위아래로 움직이면 날아가지만 ㅋㅋ)
4번과 5번을 할때 가능하면 바닥에 가장가깝게해서 캘리할수록 좋고 이번에도 높이는 똑같이 유지해야함(위치는 크게 신경안써도 되는듯)
이렇게하면 Driver4vr이 놀로와 오큘러스의 센서정보로 놀로 트래커의 X/Y/X값이 할당 완료되는거임
이제 헤드셋을 쓰고움직이면 움직여지는데 뭔가 하나빠진 항목이있었지?
바로 Foot angle correction 항목임
이게 뭐냐면

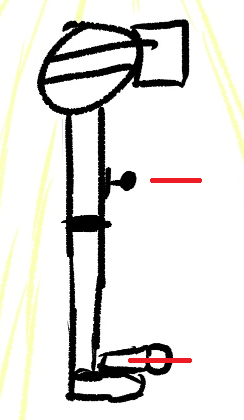
우리가 캘리할때 놀로베이스스테이션의 정보는 저 동그란 부분으로 동기화했는데
실제 스팀에서 인식하는 위치는 파란부분에 트래커가 있다고 인식함
그래서 각도의 오차가 발생하는데 이걸 보정해주는 항목이 Foot angle correction임
이 수치는 캘리할때 자동으로 얻지못하고 실제 플레이하는중 자동으로 학습해서 채워지게되는데 이 작업때문에 VR챗을 하는동안에 지멋대로 방향이 돌아가는거임
즉 한번 정확한 값이 입력이 되버리면 이후엔 더이상 돌아가지 않는다는거지
정확한 Foot angle correction값을 찾기위해선 풀트래킹을 장비한상태로 가능한 많은 공간을 돌아다니면서 변수를 모아주는 작업이 필요하니까
VRChat를 실행하기전에 이곳저곳 움직이고 방향도 휙휙 돌려가며 정보를 모아주는게 좋음
계속 움직이다보면 발컨트롤러의 방향이 더이상 안돌아가고 계속 유지되게될텐데 그때가 정보수집이 끝난거임
그 상태에서 놀로컨트롤러를 룸스케일 정면방향을 향하게 한다음 각각 전원버튼을 2번 눌러서서 컨트롤러 방향을 맞춰줌
이제 VR챗을 실행해서 행복 풀트래킹을 즐기면됨 ㅅㄱ
추가로 VRC풀트 세팅이 어렵게 느껴지는 사람을 위해 다른곳에 자세하게 적혀있어서 링크하나 더 가져옴
내가 사용하는 풀트래킹 설정방법(작성:카디아.)
문제는 위 글을 참고하긴하는데 위 글은 바이브를 기준으로 작성되있음 ㅠㅠ
하지만 바이브와 다르게 놀로연동할땐 캘리할때 기준이되는 오큘장비랑 완전히 겹칠수없기때문에
스팀VR내부에서 트래커위치가 완벽히 동일하지않게됨 그래서 아바타랑 캐릭터 자기몸이랑 링크할때 공을 기준으로 링크하면 자세 좀 이상해지니까
오큘은 코쪽으로 현실세계보이니까 왼쪽눈감고 오른쪽눈만 뜬상태로 캐릭터 오른발이랑 현실오른발위치 맞추고
반대로 오른쪽눈감고 왼쪽눈만뜬상태로 왼발 맞추면 자세까지 완전깔끔하게 잡힘
행복 풀트래킹 하자 ㅎㅎ

베이스 시야에 가려져서 인식못하는거말곤 더이상 방향이 돌아가지도 않고 완벽하게 잘됨

정말 좋습니다