귀찮아서 안쓰려했는데 올려달라고 하시는분이 계셔서 올려봅니다. 솔직히 좋은건 혼자쓰고싶거든요.
키넥트로 다리부들거리며 개고생하지 말라구요..
금전적으로 고민하던 분들, 화질때문에 오딧세이mr등 mr을 선호하시던분들, 등등
저렴한 금액으로 훌륭한 풀트래킹 같이 즐겼으면 해요
nolo vr은 국내 중고 10만원 새거 18만원 해외 12만원정도면 구매할수 있는걸로 알고 있습니다.
(
2018 9 26 현재 네이버 최저가 17만원정도 한다네요
천장에 붙이면 360도 트래킹이 된다고는 하는데 아직 거기까지는 해보지않았고
본인도 현재 장비최대 활용하기위해 이것저것 시도중입니다.
화각이 100도 정도로 키넥트보다 훨신 넓기 때문에 좁은공간에서도 잘됩니다. 발과 허리만 들어오면 되거든요.

구매시 이런 박스에 배송이 됩니다.

생각보다 깔끔한 포장에 놀랐구요



발에 달 컨트롤러입니다.

이건 허리에달 트래커구요
특이한게 베이스스테이션이 무선이고 허리에 달아야할 트래커가 유선입니다..
hmd에 연결된 선과 함께 케이블 타이로 묶어사용하세요.
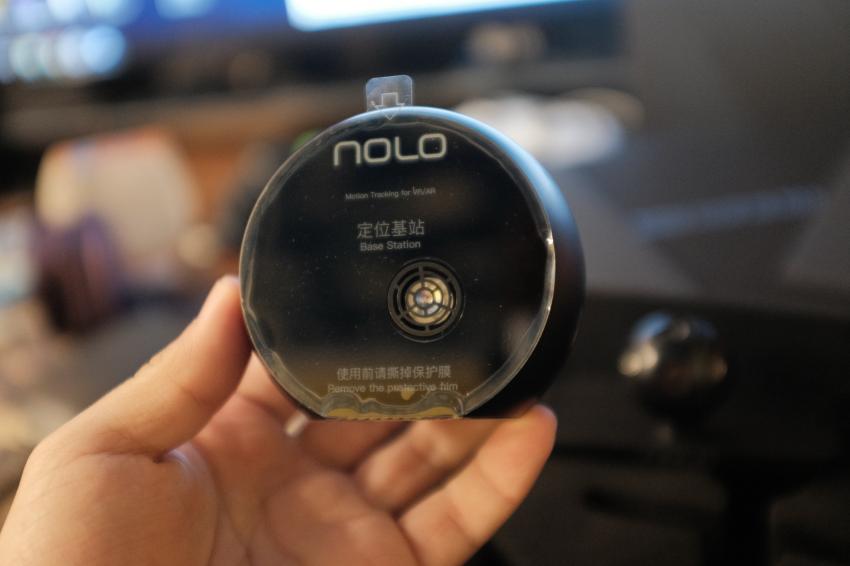
베이스 스테이션입니다.
케이블을 꽂아놓으면 배터리소모없이 사용가능합니다.
전원을 켰을때에 모터가 돌아가는것 보니 htc바이브의 베이스스테이션과 비슷한 방식이 아닐까요.. 아님 말구요
(추가)
분해하는 영상을 찾아보니 htc 바이브 베이스스테이션과 같은 라이트하우스 방식입니다.

길이도 아주 넉넉한 케이블들이 많이 들어있습니다. nolo vr은 usb 2.0으로 작동합니다
요걸로 풀트래킹을 하려면 Driver4VR이 필요합니다. 2만원인가 3만원밖에 안하니까 결제해두고요
nolo vr 윈도우 드라이버를 설치해 줍니다.
https://github.com/NOLOVR/NOLO-Driver-For-Windows
설치를 한후
허리에달 트래커를 pc와 연결, 베이스 스테이션의 전원을 켠후 nolo를 실행시켜 줍니다.
(주의) 베이스스테이션을 pc에 연결하고 트래커도 연결하면 인식오류가 나는것 같습니다.
베이스스테이션은 usb전원을 따로 연결해 줍시다.
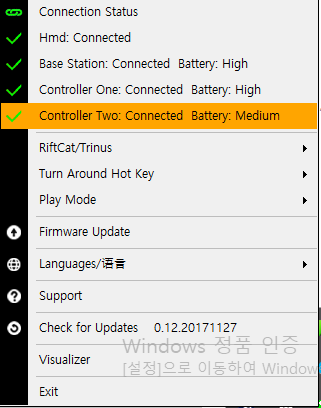
이렇게 정상적으로 연결이 된것을 확인하면 이제 바탕화면에 배치파일을 만들어줘야합니다.
스팀폴더 즉
-Steam-steamapps-common-SteamVR-bin-win64- 폴더
안에 오른쪽클릭-새로만들기-텍스트문서 로 txt파일 생성후
vrpathreg.exe removedriver “C:Program FilesLYRobotixNOLO_driver_for_windows
olo”
를 붙여넣기후 저장해줍니다.
자꾸 글씨가 지워져서 캡쳐로 대신합니다. 똑같이 쳐서 넣으시면 됩니다.
nolo 프로그램을 실행하면 스팀 vr에 드라이버가 하나 추가가되는데 driver4vr의 가상 베이스스테이션 드라이버와 중복이 될수있어 추가된 nolo의 드라이버를 지워주는겁니다.

그리고 확장자 명을 .bat으로 변경해줍니다. ( 알려진 확장자명 숨김 옵션이 켜져잇을수 있으니 알아서 옵션을꺼줍니다)
만들어진 bat파일을 실행하기 편하게 바탕화면으로 바로가기를 만들어줍시다.
이로서 모든 준비가 끝났
끝난줄 알았으면 아직 남았습니다.
이대로도 가능하지만 오랜시간 움직이지않으면 전원이 자동으로 꺼져서 아주 짜증이납니다.
그래서 개발자용 펌웨어를 올려줘야 합니다.
http://forums.nolovr.com/uploads/editor/53/bmy4d7nzfhwe.zip
를 받아두고 https://github.com/CopterWithCamera/Tools/releases/download/V0.3/PortHelper.exe
포트 헬퍼를 받고 http://samedisk.com/en/download.php?id=5 dfuse 데모를 설치합니다.
먼저 모든 nolo 장치를 연결해제하고 발에달 한쪽 컨트롤러만 꽂아줍니다.
그리고 포트헬퍼를 실행하고
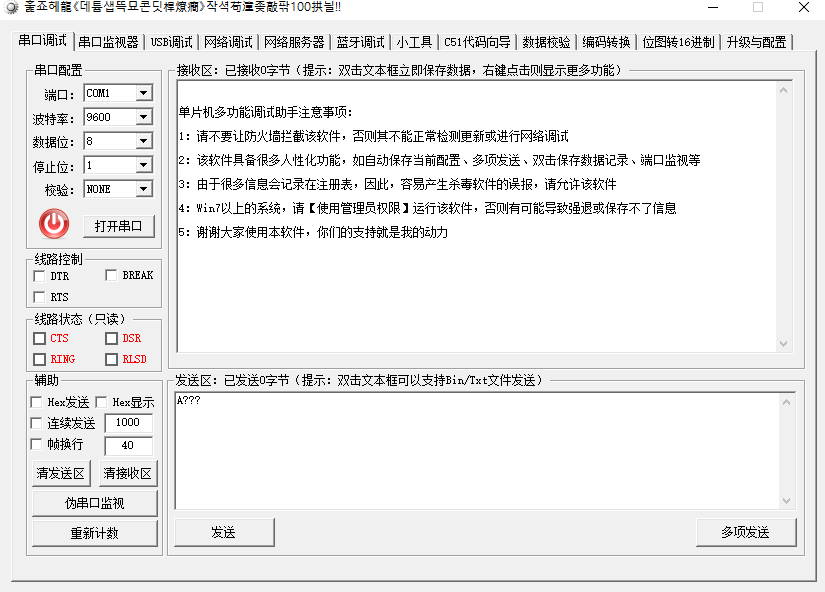
네 중국어입니다. ㅡㅡ
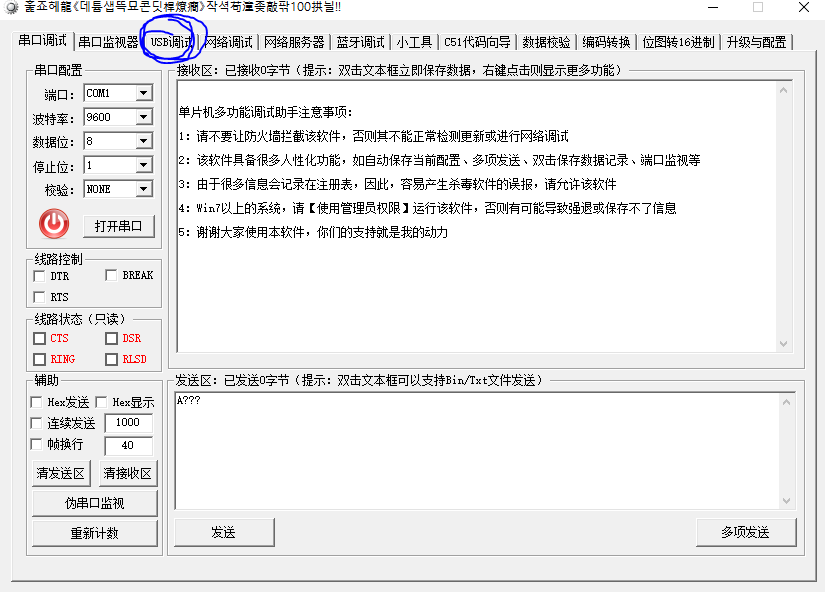
위쪽의 3번째 usb 머시깽이를 눌러주고
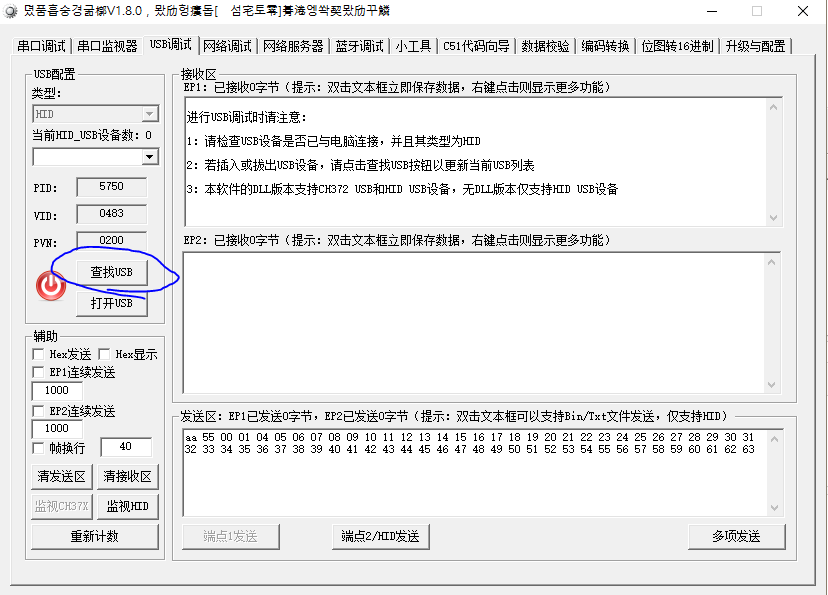
왼쪽의 머시깽이 usb를 눌러주면 usb연결된 장치가 새로고침됩니다.
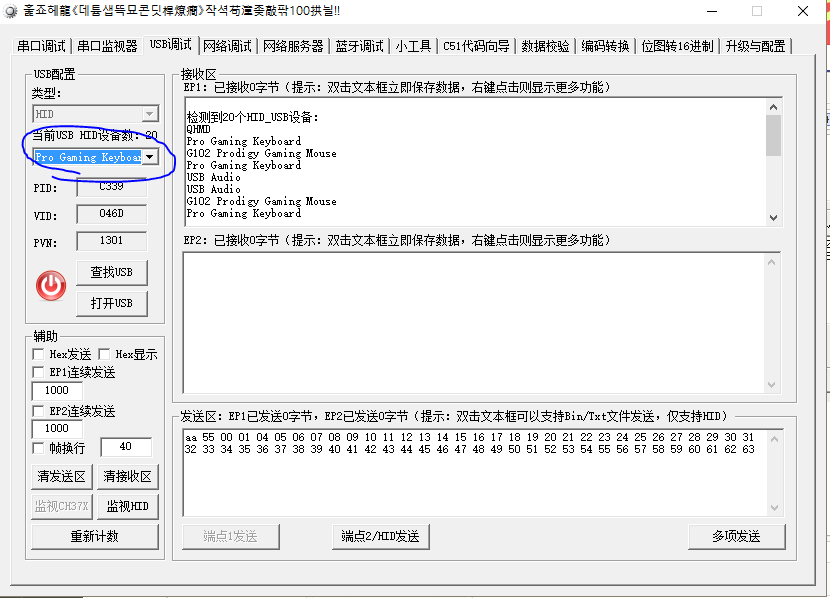
저부분을 클릭해 NOLO로 선택해줍니다.
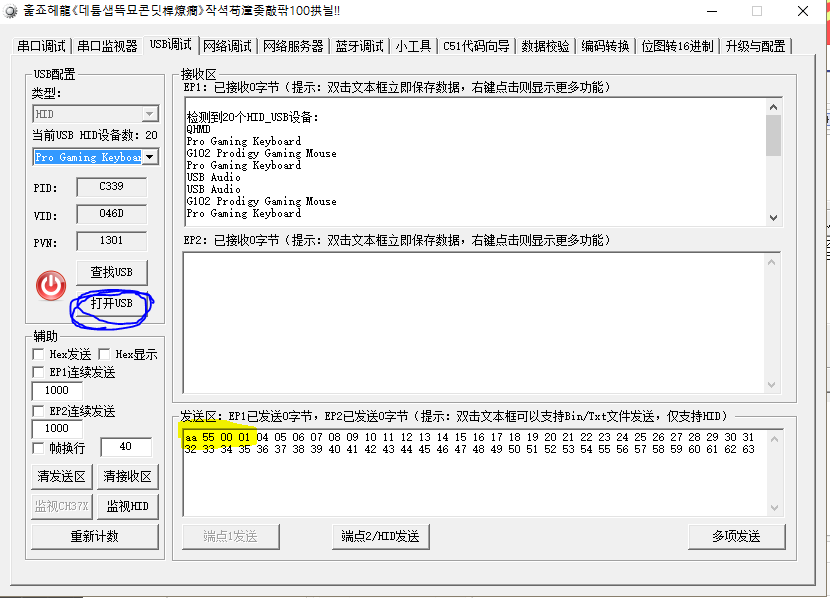
그리고 왼쪽위의 머시기 usb 아래것을 눌러줍니다.
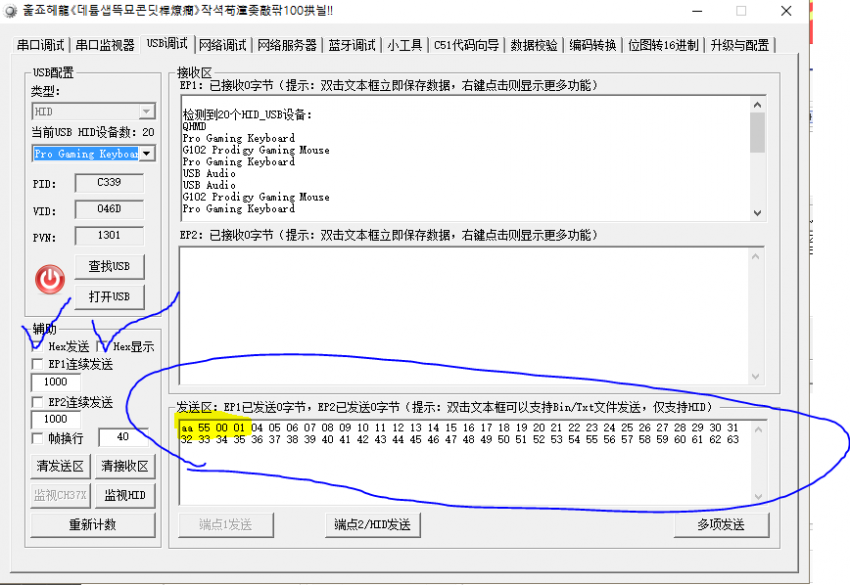
눌렀으면 왼쪽아래의 HEX머시기 2개를 체크후 오른쪽아래를 보면 숫자 2개씩 쫙있을겁니다.
앞에서부터 00 01 02 03 로 되어있는것을 aa 55 00 01 로 바꾼후
아래의 머시기2/hid머시기를 눌러주고
dfusedemo 를 실행시킵니다.
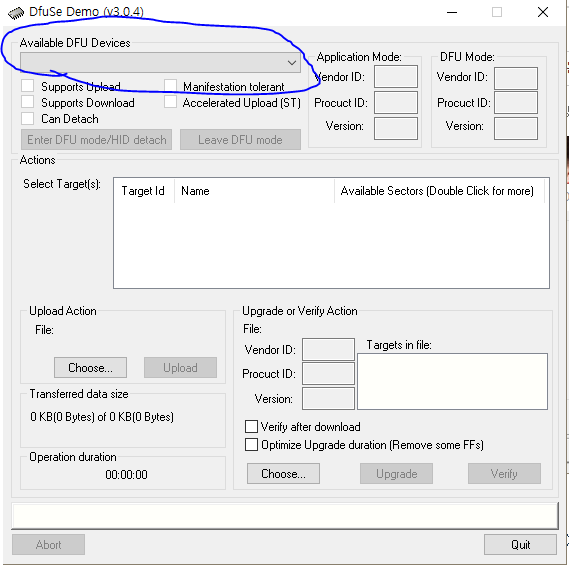
이부분에 sfu어쩌구 였나 떳을겁니다.
오른쪽아래의 Choose 를 누른후 아까 받은 개발자용 펌웨어 http://forums.nolovr.com/uploads/editor/53/bmy4d7nzfhwe.zip
를 압축풀어 dfu파일을 열은후 Upgrade를 해주면 끝입니다.
반대쪽 컨트롤러도 마찬가지로 해주면 되고 나머지 베이스 스테이션과 허리에 달 트래커는 상시 전원이므로 해줄필요가 없습니다.
완료가 되었으면
https://www.youtube.com/watch?v=wrEywuWb8zQ영상을 보고 페어링을 해준후
허리에 달 트래커를 연결, 아까만든 bat파일 실행 (1회만 해주고 그뒤로는 nolo 프로그램 실행을 해야한다거나 등, 필요에따라 사용), drive4vr을 실행, body tracking 을 NOLO VR로 선택후 calibrate 를 들어가서
hmd바로위에 허리에달 트래커를 손으로잡고 calibrate 해줍니다. (hmd와 동위치로 칼리브레이트)
(꼭 tracker to calibrate 를 누른후 trackerhips 로 설정후 해줍시다.)
완료가 되었으면 vr챗을 실행후 양쪽 발에달 트래커(컨트롤러)를 양손에 수평, 수직으로 앞을보도록 한후 각각 전원버튼 을 2회눌러주면 허리에단 트래커, 발에단 컨트롤러가 앞쪽을 바라보도록 설정됩니다. '-중요함'
발에단 컨트롤러 한쪽만 두번눌러도 허리도 같이 설정되기때문에 양쪽의 컨트롤러를 들고 정자세로 설정해주어야합니다.
허리트래커가 정자세에서 정위치로 셋팅이되지않으면 허리움직임이 이상해집니다.
이후 아바타와 링크후 잘 사용하면됩니다.
글쓰느라 너무 힘들었습니다.
더 궁금한 사항이나 문제점해결 등은 디스코드 #7515
로 부탁드립니다. 영상은 너무 힘들어서 생략합니다.
키넥트는 30프레임, 노로는 120프레임 트래킹합니다.
비교자체가 안되며 nolo로 해보니 발목은 돌릴수 있는데로 잘돌아가고 눕기, 앉기 잘됩니다.
키넥트쓸때와는 차원이 다른 허리돌림 아주 만족하며 사용하고 있습니다.
그럼 여러분 즐거운 vr챗 하시길 바래요~