
영롱한 PS무브봉의 불빛
준비물
당연히 키넥트
USB 미니B 케이블
페어링을 위한 블투 4.0 동글 (메인보드 내장이면 물론 노필요)
자력계가 있는 CECH-ZCM1U PS3 무브봉
1. 충전에 관하여
2. 페어링
3. LED 트래킹
4. 스켈레톤트래킹
1. 충전에 관하여

PS3 무브봉의 규격은 미니 B 타입이다.
옛날 디카나 MP3에서나 쓰이던,, 요샌 보기힘든 규격임
PS3 무브봉의 충전입력은 5V 0.8A (4Wh) 까지 된다.
이렇게 말하면 0.8A? 모냐 그게 ? 하겠지만
요새 다이소에서 쉽게구할수있는 충전기가 5V 2A (10Wh)고
고속충전기는 9V 2A (18Wh) 이렇게 까지감.
즉 무브봉 자체가 고전류를 받아 들일수 없어
미니 B USB 케이블을 요새 충전기에 끼운다고해도
충전이 되질 않는다,,
5V 1A 구형 충전기면 될수도 있다고 해서
해봤지만 잘 되질 않았다.
그렇다면 충전기로도 못하고, 어떻게 충전을 해야하나?
컴터에 있는 USB포트에 케이블을 끼워서 충전하면된다.
USB 2.0 포트는 5V 0.5A 까지
3.0 포트는 5V 0.9A 까지 지원하니
저전류 충전에 안성맞춤.
무브봉 배터리가 3.7v 1.3A (4.8Wh) 용량이라서
3.0포트에 끼운다면 대략 한시간 조금 넘겨서 완충이 가능하다.
당연하지만 USB 포트 없다고 무전원 포트끼우고 거기다 무브봉 여러개 끼워 충전하면
그만큼 느려짐.
2. 페어링
설치는 별거없다. 드라이브 4 VR 디바이스 매니저 항목 들어가서
PS무브봉 쪽만봐도, 사전에 깔아야하는 Ps move service 링크까지 주고 어떻게 페어링 해야하는지 알려줌
https://github.com/cboulay/PSMoveService/releases
그래도 어디서 까는지 모르겠다면 여기가서 PS무브서비스 셋업 x64를 받으면된다
처음하면 실수하는 몇가지만 짚고 넘어가겠음
바로 이 에러가 뜬다는거임.
드라이브4VR에서 페어링누르면 바로 PS무브컨피그툴 켜지는데
이러면 안되고
저거랑 같은 폴더내에 있는 PSmove service admin 이걸 실행시켜둬야함. 그러면 저런 에러 안뜨고 정상적으로 설정창 들어가짐
PS무브서비스어드민을 실행시켜도 이런에러가 뜰텐데
이건 정상임, 아마 PS카메라가 없으면 저게 뜨는거 같다.
이게 계속 켜져있어야 정상적으로 페어링이가능
페어링중엔 무브봉 중앙 하단에 있는 버튼 열심히 누르고
페어링이 끝나면
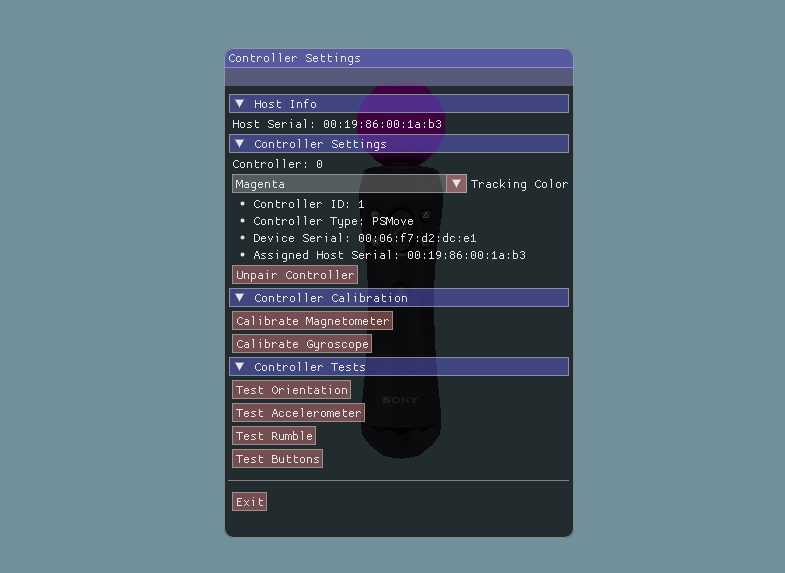
걍 딱보면 해야될게 자력계랑 자이로 캘러브레이트
저거 두개만 하면됨.
USB로 페어링후엔 블루투스로 계속연결되니까
자력계보정 한다고 막 흔들라고 하는데
그땐 USB 때놓은 상태라도됨.
나머진 뭐,, LED 색깔정도만 지정해주면 된다.
말했듯이 별거 없어서 뭐 영상볼 필요도 없다. 진짜 쉬움.
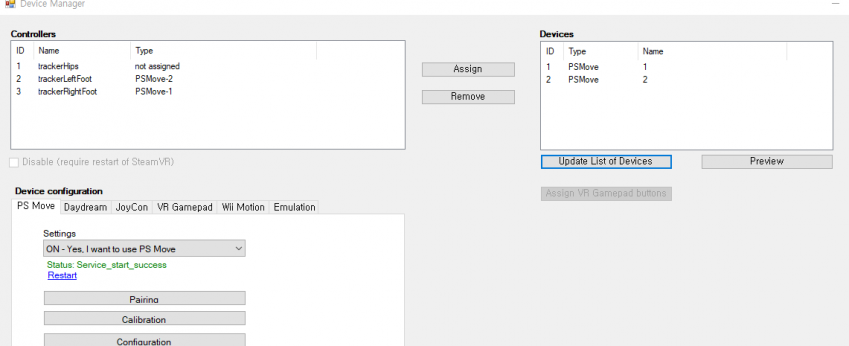
그리고 각 트래커에 무브봉을 할당해주면 끗이다.
이러면 각 유사트래커에 무브봉이 측정한 3축정보가 들어감.
이상태에서 하던대로 스켈레톤 트래킹만해도 크게 개선된다.
3. LED트래킹
LED 트래킹 설정방법
ㄴ 자연스러운 발목조절
스켈레톤 트래킹 기반으로 트래커 볼 위치를 추적하고
그 볼에 3축 회전정보만 무브봉에서 따오는 것이다.
이 방식의 장점은,, 씨퓨리소스를 추가로 먹지 않는다는것.
PS무브 서비스는 돌려야하니, 그걸 고려하면 추가리소스는 기껏해야 2퍼?
즉 되게 가볍다
2.페어링 항목에서 말했지만 걍 각 유사트래커에 할당만 해두고
평소에 스켈레톤트래킹 하듯이 하면 적용됨.
따라서 하는법 보다는 성능에 관해서 논할것.
위에 저 영상을 보면 알겠지만,, 발목 움직임등이 되게 자연스러워졌다.
VR 챗 자체가 무릎같은 중간 관절없이
발쪽에 위치한 트래커볼의 좌표값이랑, 회전값에 따라서 자세가 취해지는만큼
회전값이 올바른 자세구현에 되게 중요하고
키넥트의 가장큰 단점이 회전값을 제대로 못잡는 거였지만
그걸 확실히 잡게되니 트래킹 성능이 훨씬 개선된다.

기존의 키넥트 만으로는 절대 불가능했던 자세.
다리 한쪽을 들고, 발목을 정강이로부터 직선으로 뻗고있다.

다리 뒤로들기 또한 가능
이 또한 난 무브봉 없이는 하질 못했었다.

쌩 키넥트로 제기차기 자세를 취하면
그냥 니킥 자세가 취해졌는데
이젠 가능하다.
이 자세에서 보듯이 단순 트래커볼 위치뿐만 아니라
트래커볼의 위치 자체는 같다고해도
회전값으로 포즈가 결정됨.

키넥트 유저라면 알것이다. 이런 자세를 취하면 다리가 막 드릴마냥 흔들릴수도 있는 불안정한 자세라는걸

실제로 저 자세를 취하는동안 키넥트는 저 들어올린 오른쪽 발목 방향을
키넥트는 제대로 캐치를 못했다. 저 발부분이 밖으로 나와있어야 하는데 안쪽을 향한상황
걍 스켈레톤 이라면 이럴때 캐릭터 다리는,,, 꺾여있으니
기괴한 움직임을 보이며 네크로모프가 될려고한다..
하지만 회전값을 정확하게 주니
저런 자세에서도 불안정하지않음.
이렇게만 보면 만능처럼 보일지 모르겠는데
절대 만능은 아니다. 일단 스켈레톤 트래킹에 의존하고 거기다 보정만 하는식이기에
다리가 가려줘서 스켈레톤 자세 자체가 이상하게 되면 답이없음.
저 윗짤을 보면 왼쪽편 다리만 제기차기 자세를 취할려 했는데
오른편 다리를 가려서, 무릎이 굽어지게 된 모습.
끝으로 키넥트 스켈레톤+무브봉으로 교정하는 방식은 트래커에 비빌건 아니지만
영 아니었던 키넥트를 쓸만하게 만들어주기엔 충분하다.
일단 이걸쓰면 다리가 드릴마냥 회전하며 튀는 현상 같은건 사라지고
트래킹을 안정적으로 만들어 둔다는것에 의미를 둬야함.
볼 위치자체가 튀더라도, 좀 납득이 가는 자세로 유지되고
또한 볼 회전만 주는것으로도 어느정도 세세한 움직임도 가능
이 방식이라면 허리엔 무브봉 할당안하고
발쪽에만 해도 충분하다.
난 만족함.
요약
1.충전은 USB 포트에 (3.0이 빨라서 권장)
2.LED트래킹은 고사양 유저만, 아니면 연동만해서 회전값만 보정
3.회전값만 보정했더니 훨씬 나아짐
챗갤에도 올렸다